InterfaceGeneral
Having a control system does not mean the robot will follow the line perfectly or be useful at all. The control system must be well tuned, and the robot needs to be easily controlled. The needs are as follows:
- Operator Control of the Robot (Where will it go? Will it run or stop?)
- Efficient Tuning Process (How does it drive?)
- Robot data monitoring and analysis (What could be wrong?)
For these reasons, an over-the-air interface with the robot was developed. This system enables:
- Setting the location of the stations on the track map
- Choosing the destination of the robot
- Updating control system parameters
- Receiving robot measurements in real-time
- Start and Stop functionality
- Download of robot data as a CSV spreadsheet format.
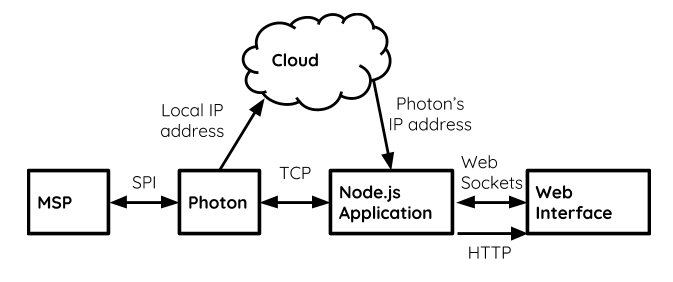
The block diagram for this sub-system is displayed as shown below