


A dual Marching Cubes method using cuboids, based on greedy meshing. Suitable for use with a uniform grid of data derived from multiple depth maps.
There's an endless amount of literature on converting voxel grids into polygon meshes. Academic papers have to pretend to be serious so they all talk about medical imaging, but obviously more often than not it's really about the games. This project is focussed around one fairly narrow use case with some helpful limitations and some important requirements: constructing 3D buildings out of panels made from depth maps, for 3D printing, for the Little Buildings app.
 An example Little Building
An example Little Building
Constraints:
- Because the voxel data is generated from depth maps, most of the geometry is "single sided" (i.e. all of the interesting details tend to be on one side, with very large flat 'backs' to each wall)
- Because we populated the voxel grid ourselves, we know the maximum depth of each wall region, and importantly, for each cell we know in which direction we are likely to find the most interesting surface details and we can assign an axis to each cell in non-overlapping regions
- For a mesh to be 3D printable, it must be watertight - i.e. any of the downsides of many existing algorithms such as self-intersecting geometry or non-manifold geometry are absolute deal breakers for us
- Because the author is a bear of little brain, the solution needs to be easily understood and implemented without lots of complicated maths (or third party maths libraries which are almost as complicated as the maths itself)
Of course the starting point for all adventures in the land of voxel meshing is the original Marching Cubes paper. You divide your space up into cells of uniform size and 'march' through them one by one. You test the corners of each cell to see whether they are 'inside' or 'outside' the mesh, and this gives you a bitmask of 8 binary values - a number between 0 and 255. This can be used as the index in a lookup table to tell you which arrangement of polygons should be output for this cell.
 The original 15 Marching Cubes base configurations
The original 15 Marching Cubes base configurations
It sounds super simple (which is obviously part of its appeal) but there are two ingenious aspects to Marching Cubes which make it significantly more powerful than you might anticipate:
- The first is the clever way they just specify 15 'base' configurations from which you can derive all of the others by a series of rotations or inversions.
- The second, less obvious point, is that you don't just have to place the vertices in each cell at the exact centre of each edge. By use of interpolation you can construct a surprisingly sophisticated mesh - it is certainly not the case that two cells with an identical 'case number' need to result in identical polygons.
 Some curved French Tiles generated with Marching Cubes, demonstrating interpolation
Some curved French Tiles generated with Marching Cubes, demonstrating interpolation
One of the main downsides of Marching Cubes is that it results in a colossal number of polygons - up to five triangles per cell, for every single cell on the surface of your mesh. Given our use case, where we have many very large, flat surfaces, this leads to vastly increased polygon counts compared with the ideal.
Another key downside of Marching Cubes is its inefficiency - if you naively traverse through every single cell in your grid then you visit a lot of cells either entirely outside or entirely inside the mesh, which contribute nothing to the final surface.
Finally, a deficit of Marching Cubes is that it is unable to represent "sharp features" - you will always end up with rounded corners. For many use cases this isn't a problem, but when adaptivity is introduced to reduce the polygon count this can become very significant.
Beyond the original Marching Cubes paper, many have attempted to introduce an element of 'adaptivity' - to find areas where you can reduce the sampling rate and merge polygons together. A common approach is that explained in Octree-Based Decimation of Marching Cubes Surfaces and is based on the concept of an 'octree' - a way of dividing 3D space in half in each of the three dimensions, resulting in 8 subspaces. Each cell can be further subdivided into eight again and again until each cell is the same of one grid cell. The algorithm then centres around merging selected octree nodes and repeating the Marching Cubes algorithm on these larger "cubes". If the distortion caused by sampling at this lower resolution is under some threshold then you proceed, otherwise the higher resolution cells are retained.
 An Octree cell with eight child nodes
An Octree cell with eight child nodes
The Octree seems to be the favoured data structure in all of the literature, because it allows you to easily reason about which cells neighbour which others at varying resolutions, and for the kinds of meshes usually being considered it produces an adequate degree of adaptivity. However, it is fairly unsatisfactory for our use case because it works best for meshes where the sections of the mesh that can be combined are fairly evenly distributed between the eight cells. Because you can only merge whole cubes at a time, if there is very high detail in the 'front' part of the mesh and very low detail in the 'back' part of the mesh, you frequently have to choose between over-merging the front of the mesh or under-merging the back of the mesh.
The other main problem with the octree approach is the issue of so-called "cracks" that occur when a low resolution cell (which has been merged) neighbours a high resolution cell (which has not been merged). The original paper uses a form of "crack patching" that attempts to disguise the gaps by moving the higher resolution vertices to line up with the lower resolution edges. However, whilst this might look visually correct, it is of no value for our key requirement of water-tightness, since the crack is not actually joined up in any meaningful way. Other approaches involve filling the gap with additional triangles, but this still requires extra effort and is rather unsightly.
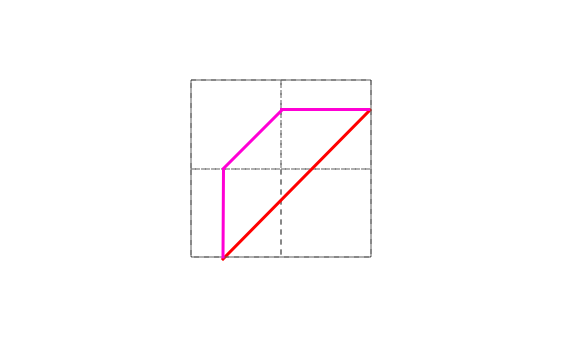 An illustration of when cracks appear when a low-resolution node (the red surface) neighbours higher-resolution nodes (the purple surface). The space between the two lines will form a 'crack'
An illustration of when cracks appear when a low-resolution node (the red surface) neighbours higher-resolution nodes (the purple surface). The space between the two lines will form a 'crack'
The truth is that octrees are just one possible scheme for merging cells, although there seems to be very little published literature exploring alternative approaches.
The authors of Octree-Based Decimation of Marching Cubes downplay this as a mere aside, but another key concept that they introduce is the notion of "surface tracking". They make the observation that if the surface is continuous, from key "seed" cells you can just track the surface into neighbouring cells, remembering which cells you have visited previously, and very efficiently visit every non-null cell without having to examine any of the dead space around it at all. Since you know which edges the surface intersects for each Marching Cubes case, from that you can easily deduce which faces to track through.
![]() 2D surface tracking: only the grey cells need to be visited at all
2D surface tracking: only the grey cells need to be visited at all
If you had no prior knowledge of your surface then finding those seed cells might be tricky, but since we generated our surface ourself we know exactly which cells to start from.
To overcome several of the deficiencies of Marching Cubes, there is a whole category of solutions known as "dual" methods. Whereas Marching Cubes puts the vertices on the edges of each cube, instead the dual methods put the vertices inside each cell. The key observation here, which will become very important for us later on, is that you only ever need one vertex per cell. For the relevant groups of four cells that share a common edge you then output a quad, using the vertices from each cell.
 A 'dual' contour with one vertex per cell. Note how this way we can have sharp corners
A 'dual' contour with one vertex per cell. Note how this way we can have sharp corners
As with Marching Cubes, the magic is in deciding where to position the vertex within each cell. In the most basic SurfaceNets algorithm you might just use the centre of each cell, but with fancy mathematical magic you can do significantly better than that if you know the gradient of the surface at each point as well (what they call "hermite data").
Dual Contouring is the most common version of this approach. The core of the idea is actually even simpler to implement than Marching Cubes (just look at how few lines of code this Python sample requires!) but the authors of the paper do their best to obscure this with all the maths. I was scared off reading about this algorithm until right at the end of my search, whereas I wish I had started here first! There is an excellent explanation of Dual Contouring by Boris the Brave that I recommend reading.
Just like with Marching Cubes, you can combine the dual methods with octrees to introduce some adaptivity - this is explained in the original paper, or the Dual Marching Cubes paper shows how you take each of the quads output from your Dual Contouring and apply Marching Cubes to those. The beauty here is that no matter how many times you merge your cells, and how large they become, in theory you still only need one vertex per cell. As a result, it's impossible to get cracks in these dual methods so you don't need to worry about crack patching when smaller cells meet larger cells.
Dual Contouring usually leads to much more natural looking results and can represent sharp corners. They also correspond well to the kind of depth map data we are using - equivalent to using one vertex per "pixel" of the depth map. A paper which explores this idea is Efficient generation of 3-D models out of depth maps - although their use case is more about combining depth data from camera images taken from various angles.
The main gotcha with Dual Contouring is that if you use the hermite data you can end up with the vertices being outside the cell that they belong to, which can then result in self-intersecting geometry. The fact that there's only one vertex per cell, in certain cell configurations, can also result in non-manifold geometry, where you have more than one surface sharing the same vertex but heading in different directions. Extensions of the original algorithm centre around using more than one vertex in these situations (in Marching Cubes you might have up to four separate surface elements per cell). Manifold Dual Contouring is one such effort.
The final concept which we must explore is that of "Greedy Meshing". Voxel-based games with a deliberately block-based graphical style, such as MineCraft, need a way to reduce their polygon count when there are many blocks of equal sizes next to each other. "Greedy meshing" algorithms are one approach, which is explained on the Roblox blog or in this post with a nice animation. Basically you start in one corner, and expand in one direction as far as you can (hence the term "greedy"). Then you attempt to grow that entire block in a perpendicular direction. Finally, you expand that block in the third dimension as far as you can go. All the time you mark the cells that you have expanded into as "visited". Once you have expanded that block as far as it can go, you then continue to the next unvisited cell and repeat.
 An animation showing the process of combining blocks in 2D. The process is easily extended into 3D
An animation showing the process of combining blocks in 2D. The process is easily extended into 3D
The result is a complex interlocking pattern of cuboid blocks. The key observation of our Dual Marching Cuboids algorithm is that by use of surface tracking we can easily build a graph connecting neighbouring cuboid blocks together, and just like with an octree, only one vertex is required per cuboid to construct a surface, with only minor loss of accuracy.
The challenge with Greedy Meshing is to know which axis to expand into first, since obviously there are many permissable cuboid configurations. Importantly, our particular use case means that for each cell we know which axis the details are oriented along, and we know the maximum typical depth, allowing us to generate a large number of equal sized cuboids that can subsequently be merged with ease.
For our fairly narrow use case, we can combine the above approaches into a new algorithm referred to here as Dual Marching Cuboids. Roughly speaking, the algorithm works like so:
- During Voxel generation, keep a list of seed cells with the vertex position and surface gradient at each point (already a massive head start)
- For each seed cube, determine the marching cubes case and use that to perform surface tracking, adding various new seed cells to the queue in the process. Stop when all seed cubes have been examined.
- Use the same logic as other greedy meshing algorithms to merge neighbouring Cuboids where appropriate- all the while maintaining just one vertex per cuboid. We can use the "axis" information to decide which way to grow first.
- For any cubes that we don't have a vertex position for, where possible interpolate a vertex position from its surface neighbours. There will be certain "ugly corners" that we need to collapse in to the vertex 'in front' - equivalent to "sliver elimination" in the Dual Marching Cubes algorithm.
- We can then triangulate as per Dual Contouring: for each cuboid, look for neighbouring Cuboids in the graph and for each edge included in the Marching Cubes case we will output a quad (two triangles). The winding order is determined by which end of that edge is inside/outside the surface.
 An animation showing the process of forming cuboids in 2D (top-down perspective). First the cuboids are extended as far as they can go towards the 'back' of the mesh (upwards) and the 'front' (downwards). Then cuboids are merged horizontally if the conditions are met.
An animation showing the process of forming cuboids in 2D (top-down perspective). First the cuboids are extended as far as they can go towards the 'back' of the mesh (upwards) and the 'front' (downwards). Then cuboids are merged horizontally if the conditions are met.
In the basic case where we have a uniform grid of cubes, the way we handle triangulation is to look at each cube in turn and look for pairs of neighbours. In the 2D example below, considering the cube containing the red vertex, there is a red triangle using the neighbours above and to the right, and a cyan triangle using the neighbours below and to the left.

Obviously this gets a little more complicated for a non-uniform grid, but it's actually still surprisingly similar. For each cuboid, look for a single "right" neighbour and "up" neighbour pair, and also a "left" neighbour and "down" neighbour pair. A cuboid may have multiple cuboids that touch its right hand edge - the "right" neighbour is the topmost of these. Similarly, the "left" neighbour is the lowest cuboid that touches its left edge:

Here is the same "French Tiles" grid as shown in the "Marching Cubes" explanation above, but with Dual Marching Cuboids instead. Instead of 25,020 polygons it outputs just 4,302. On my relatively ancient 2014 MacBook Pro it build took just 0.1 seconds to run:

Here is the underlying cuboid structure:

To run the example project, clone the repo, and run pod install from the Example directory first.
DualMarchingCuboids is not yet available through CocoaPods. To install it, simply add the following line to your Podfile:
pod 'DualMarchingCuboids', :git => "[email protected]:andygeers/DualMarchingCuboids.git"DualMarchingCuboids is available under the MIT license. See the LICENSE file for more info.