LSM6DSL
lsm6dsl是一款具有数字加速度计和数字陀螺仪功能的低功耗传感器,通过I2C协议进行数据交互,这里我们会实现定时读取传感器的加速度值以及陀螺仪的旋转数据,并上报到LD云端;
DevelopKit开发板上自带有lsm6dsl传感器(图1红色圆圈处),并连接到stm32的I2C2端口;
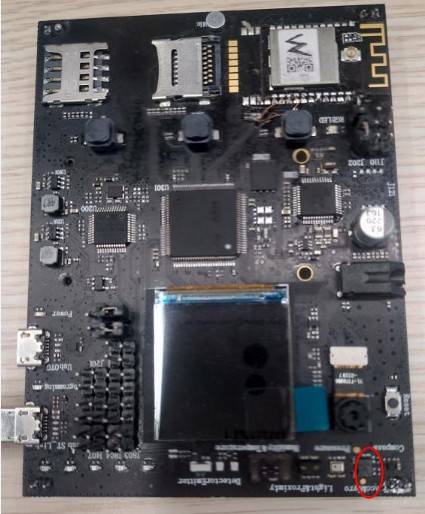
图1
根据lsm6dsl的数据手册,加速度计和陀螺仪的数据主要存放在寄存器0x28-0x2C、0x22-0x26中,初始化配置完成后,我们可以从这些寄存器中读取传感器的实时数据值:
/*DevelopKit开发板配置文件*/
{
"I2C": [
{
"id":"lsm6dsl",
"port":1,
"address_width":7,
"freq":400000,
"mode":1,
"dev_addr":214
}
]
}
/*lsm6dsl.js*/
......
/*读取加速度计数据*/
lsm6dsl.getAcc = function(){
var acc = [0,0,0];
if(0 == this.isInited){
this.init_config();
this.isInited = 1;
}
acc[0] = this.read_two(this.xlowAccReg);
acc[0] = acc[0] * 61 / 1000;
acc[1] = this.read_two(this.ylowAccReg);
acc[1] = acc[0] * 61 / 1000;
acc[2] = this.read_two(this.zlowAccReg);
acc[2] = acc[0] * 61 / 1000;
return acc;
};
/*读取陀螺仪数据*/
lsm6dsl.getGyro = function(){
var gyro = [0,0,0];
if(0 == this.isInited){
this.init_config();
this.isInited = 1;
}
gyro[0] = this.read_two(this.xlowGyroReg);
gyro[0] = gyro[0] * 70;
gyro[1] = this.read_two(this.ylowGyroReg);
gyro[1] = gyro[1] * 70;
gyro[2] = this.read_two(this.zlowGyroReg);
gyro[2] = gyro[2] * 70;
return gyro;
};
......
/*index.js*/
......
/*发送数据到云端*/
var postEvent = function(val) {
var obj={};
var id;
var attrs = device.properties;
obj['Xacc'] = val[0];
obj['Yacc'] = val[1];
obj['Zacc'] = val[2];
obj['Xgyro'] = val[3];
obj['Ygyro'] = val[4];
obj['Zgyro'] = val[5];
var event = device.events[0];
device.update(event, obj);
};
......传感器数据在串口的打印:

设备运行并接入LD一站式开发平台后,设备上传的数据将显示在界面上:

http://gitlab.alibaba-inc.com/Gravity/gravity_lite/tree/master/devices/lsm6dsl�