Implementation of A* Graph Search Algorithm for a 2D Path Planning Problem with ROS
This implementation is done as a catkin package, so it can be easly compiled with
catkin_make
catkin build
I strongly recommend building the package with "-DCMAKE_BUILD_TYPE=Release" flag to increase the efficiency.
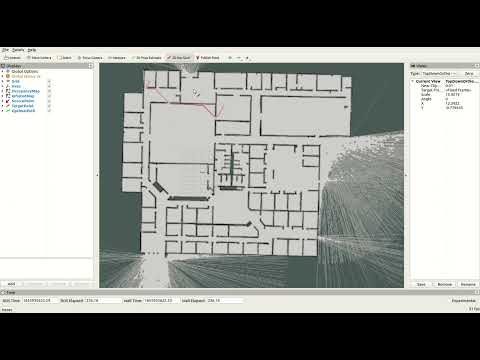
For the demostarition a ros node that subscribes to
/map
/initialpose
/move_base_simple/goal
and publishes
/inflated_map
/optimal_path
is created. One can use the rviz navigation tools to set "/initialpose" and "/move_base_simple/goal".
To run the demo, run the following command after sourcing the catkin workspace
roslaunch astar astar.launch