![]()
Changelog v.0.5.0 -> v.0.6.0c:
- Added bz2 support for input files
- dropped Python <=3.6 support
- fixed minor issues with v.0.6.0a
- improve code quality from v.0.6.0b
OSMtoRoadGraph aims to provide a simple tool to allow extraction of the road network of OpenStreetMap files. It differentiates between three transportation networks: car, bicycle, and walking. The output data depends on the chosen parameters (which street highway types to consider, speed, ...).
OpenStreetMap provides free cartographic data to anyone. Data can be added and edited by anyone. However, using the road network contained in the OSM files is not straightforward. This tool aims to reduce the overhead of writing a parser for OSM files.
Below is an example of a visualization of the road network of the city of Bremen, Germany. The darker the shade of the street, the higher the maximum allowed speed.
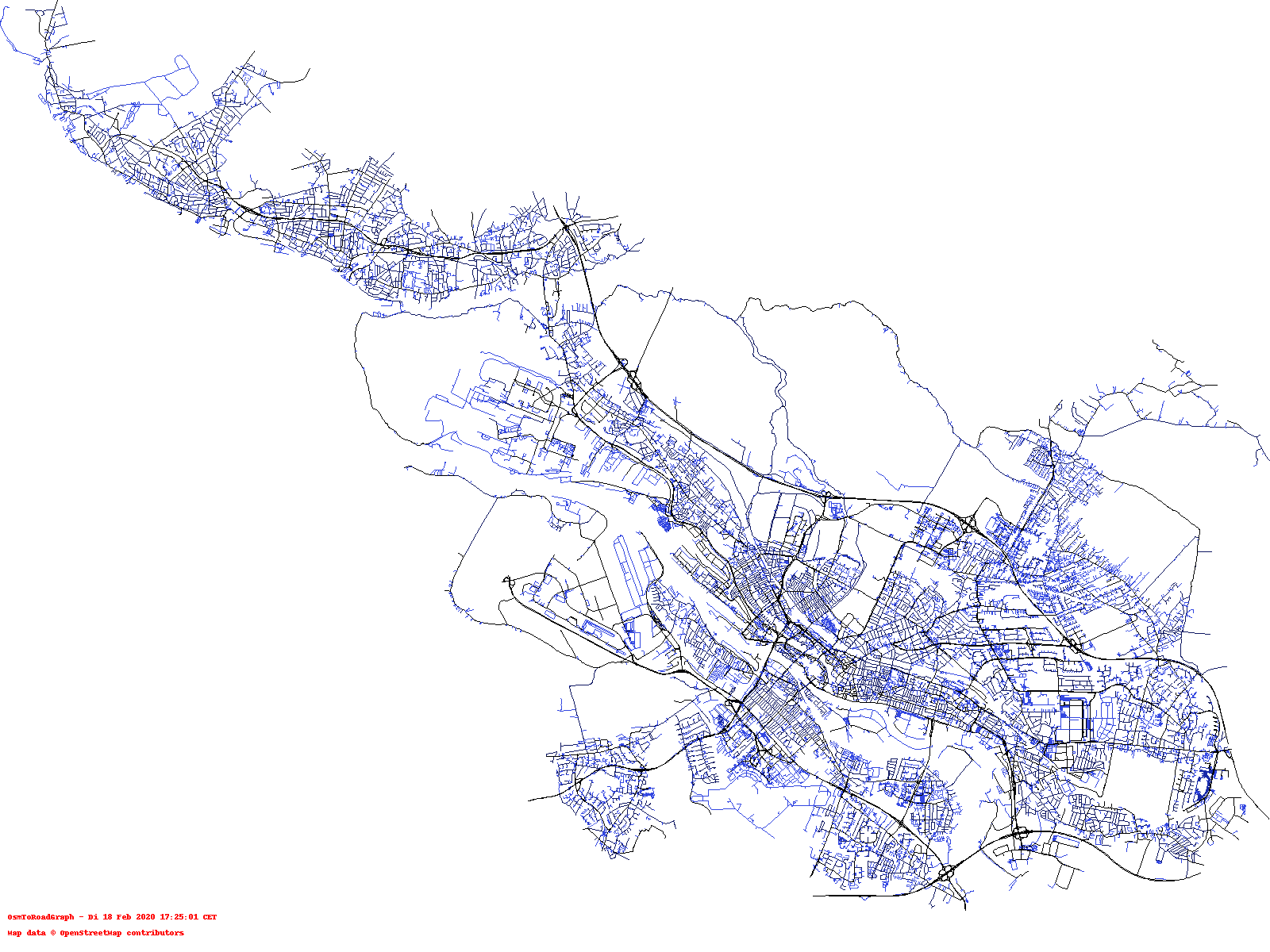
For details on how the image was generated take a look into the examples folder.
With this tool, osm data can be converted into easily parsable plaintext files that can be used by any application for further processing. The program generates with default input parameters two output files. One file contains the nodes (with coordinates), and the network edges with length, direction, and maximum speed (according to chosen network type). The second file contains street names for all edges for which the data is available.
As an additional feature, and to make interaction easier, since version 0.5 OsmToRoadGraph supports to produce output in a networkx json.
- Python 3.7+/PyPy
- An OSM XML file
- [Optional: networkx as dependency:
pip3 install networkx]
Recently, breaking changes have been applied. If you require older versions please see the releases.
usage: run.py [-h] [-f FILENAME] [-n {p,b,c}] [-l] [-c] [--networkx]
optional arguments:
-h, --help show this help message and exit
-f FILENAME, --file FILENAME
-n {p,b,c}, --networkType {p,b,c}
(p)edestrian, (b)icycle, (c)ar, [default: p]
-l, --nolcc
-c, --contract
--networkx enable additional output of JSON format of networkx
[note networkx needs to be installed for this to
work].-f points to the input filename; the output files will be created in the same folder and using the name of the input file as prefix and suffixes depending on the network type.
This filename must be either an OSM XML file (usually has the file extension .osm) or such a file compressed by bz2 (usually has the file extension .bz2).
If it is a bz2 file, the content will be decompressed in memory.
-n sets the network type. This influences which edges are selected, their maximum speed, and if direction is important (it is assumed pedestrians can always traverse every edge in both directions, and their maximum speed is 5kmh). If you want to fine-tune this for your needs, see Configuring the Accepted OSM Highway Types.
-l if you set this option the graph will be output as a whole but may contain unconnected components. By default, the largest connected component is determined and the rest is dropped.
-c if you specify this flag additional to the original graph, a second pair of filenames will be created containing the result of contracting all degree 2 nodes.
--networkx if you specify this flag, an additional output file will be generated using networkx's networkx.readwrite.json_graph.adjacency_data. This also works with the flag -c. Then, a non-contracted and contracted output file compatible to networkx will be generated.
Example execution:
python run.py -f data/karlsruhe_small.osm -n p -vTo see what you can do with the output please have a look here:
- pycgr to png: small python script that loads the output of this program and generates a drawing of a road network
- shortest distances drawing: another python script that loads the networkx output of this program and generates a drawing of the road network and uses colors to encode distances.
The output will consist of two plaintext files. One file ending in .pypgr, pybgr, or pycgr depending on the network type selected; the other file will have the same ending with the additional suffix _names. The first file contains the graph structure as well as additional information about the edge (length, max speed according to highway type, if it is a one-way street or not). The file ending with _names includes the street names for the edges.
If the option --networkx is specified, there will be an additional output file with the file extension .json. See networkx.readwrite.json_graph.adjacency_data for more details.
The structure of the road network output file is the following:
<HEADER LINES STARTING WITH A DASH(#) CHARACTER>
<number of nodes>
<number of edges>
<id> <lat> <lon>
...
<source_node_id> <target_node_id> <length> <street_type> <max_speed> <bidirectional>
...
The file begins with a header (some lines with a # character).
Then, two lines follow that contain the number of nodes and the number of edges.
After this, two larger blocks follow. In the first block, the nodes are being described, and in the latter the edges are described.
The first block consists of <number of nodes> many lines, and the second block consists of <number of edges> many lines.
The nodes of the graph are described by the following three parameters. Each node's data is stored in one line, and the parameters are separated by a space:
<id>: the node id (used later in the part where edges are to describe which nodes are connected by an edge)<lat>: latitude of the node<lat>: longitude of the node
Edges of the graph are described by 6 parameters. Each edge is stored in one line, and the parameters are separated by a space:
<source_node_id>: the node id (see above) from which the edge originates<target_node_id>: the node id (see above) to which the edge leads to<length>: the length of the edge in meters (approximated)<street_type>: one of the OSM highway types (see: https://wiki.openstreetmap.org/wiki/Key:highway)<max_speed>: maximum allowed speed (if exists) in km/h [note: if no max speed is found a default value will be used]<bidirectional>indicates if an edge is bidirectional. The value is0if it is a unidirectional road (fromsource_node_idtotarget_node_id), and otherwise it is1.
# Road Graph File v.0.4
# number of nodes
# number of edges
# node_properties
# ...
# edge_properties
# ...
4108
4688
0 49.0163448 8.4019855
1 49.0157261 8.405539
2 49.0160334 8.4050578
...
531 519 93.87198088764158 service 10 0
524 528 71.98129087573543 service 10 1
528 532 22.134814663337743 service 10 1
532 530 12.012991347084839 service 10 1
530 531 12.76035560927566 service 10 1
531 529 14.981628728184265 service 10 1
529 501 77.18577344768484 service 10 1
501 502 10.882105497189313 service 10 1
75 405 14.312976598760008 residential 30 1
405 206 44.642284586584886 residential 30 1
...
Hölderlinstraße
Hölderlinstraße
Hölderlinstraße
Kronenstraße
Kronenstraße
Kronenstraße
Zähringerstraße
Zähringerstraße
Each line consists of a street name. The number in which a line is corresponds to the edge's index. In this example. this means, that Hölderlinstraße is the street name of edges 0, 1, 2. The absence of a name in line 4 indicates that edge 3 has no street name. Edges 4, 5, 6 have street name Kronenstraße, and so on...
The application comes with a set of standard configuration to parse only some OSM ways that have the tag highway=x where x is a highway type [notable excepting is the pedestrian_indoors, see below for an explanation].
You can change the behavior of this program by changing the values (removing unwanted, and adding missing values) in the configuration.py.
In this file, you can also modify the speed limit that will be written to the output file.
By default elements tagged by the Simple Indoor Tagging approach are being ignored.
To enable to also to extract these paths replace in configuration.py the line
accepted_highways['pedestrian'] = set(["primary", "secondary", "tertiary", "unclassified", "residential", "service", "primary_link", "secondary_link", "tertiary_link", "living_street", "pedestrian", "track", "road", "footway", "steps", "path"])with
accepted_highways['pedestrian'] = set(["primary", "secondary", "tertiary", "unclassified", "residential", "service", "primary_link", "secondary_link", "tertiary_link", "living_street", "pedestrian", "track", "road", "footway", "steps", "path", "pedestrian_indoor"])Note that the change is only the addition of pedestrian_indoor in this list.
Temporal Map Labeling: A New Unified Framework with Experiments