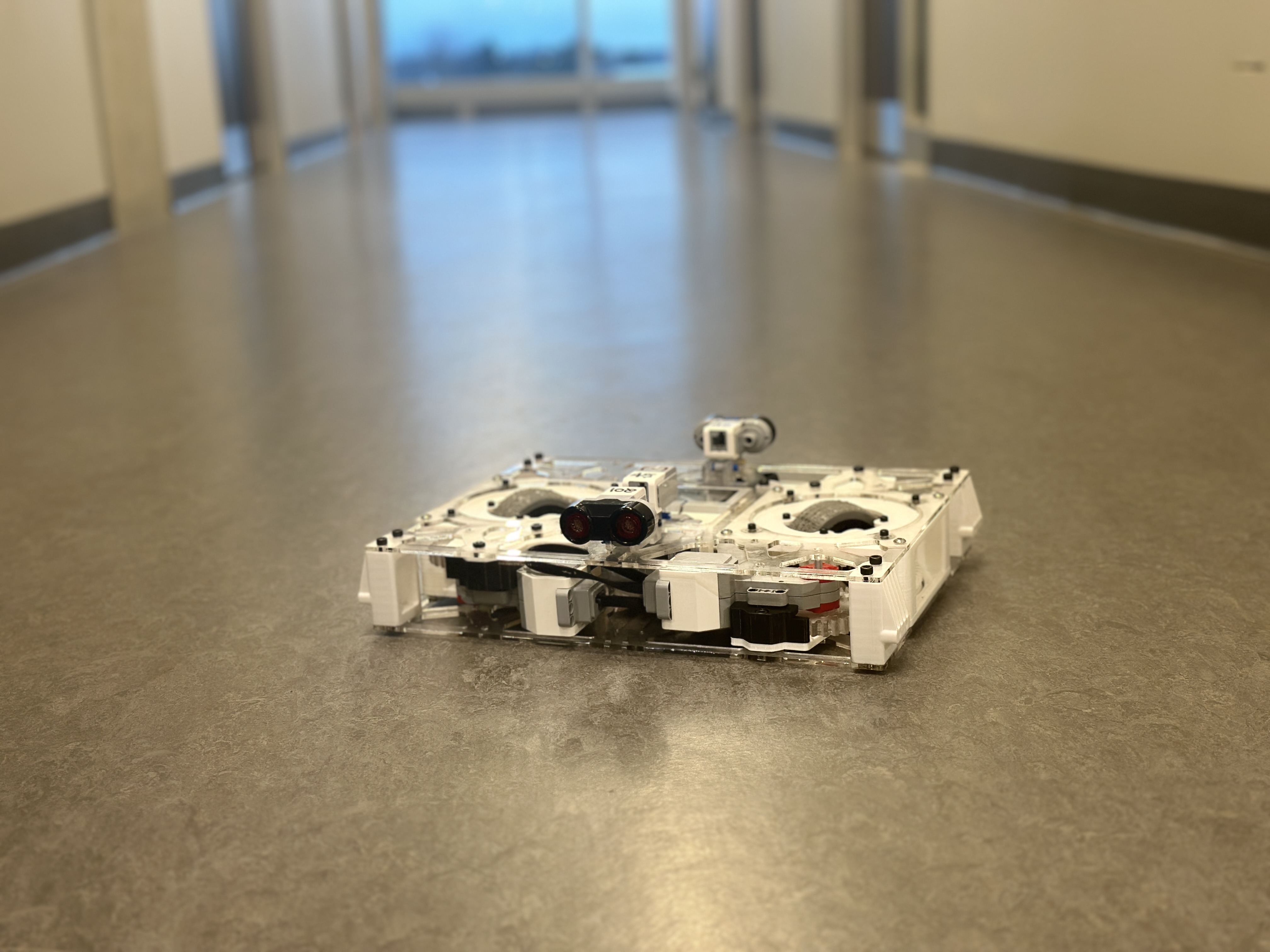
Made in 4 weeks, this robot utilizes every last drop of power avaliable in a LEGO Mindstorms EV3 kit. Using its custom differential swerve drive system, it's path following and path traversing capablities are the first of its kind for something powered by LEGO.
The final robot created by this team can consistently reach various “delivery locations” autonomously to mimic a real-world delivery scenario. In order to meet this challenge, a custom differential swerve drive train is used, this allows the robot to move in any direction without the need for turning the chassis. This was chosen to improve maneuverability in tight spaces. Major constraints were the short amount of time to complete the project, the physical and computational limitations of the required use of the LEGO EV3, and the poor performance and limited functionality of the required programming language RobotC. Success criteria can be summarized as: the robot can consistently reach the given delivery locations, the swerve modules operate as expected, and all constraints were overcome. Programming restraints were overcome via thorough planning, exploration of alternative solutions, and repeated trial and error. The main code process is broken down and managed by individual files, structs, subtasks, and functions to maintain an easy to read and highly modular system while also completing several complex tasks in a highly efficient manner. Due to the selected fast-paced and iterative design strategy, the full swerve drive was created of modular parts and subassemblies that were replaceable and quick to manufacture. At the center of the design is the differential gearbox which enables omnidirectional movement. The result is an extremely compact driving platform, that is more robust than traditional drivetrains. Overall, the completed project met all criteria and constraints. Hardware recommendations include spending more time iterating mechanical design, finding higher resolution printers to 3D print gears. Software recommendations include completing the development of a teleoperated mode as well as 2D path plotting software.
For more information about this project, check out my